マクイーンの操縦
前のプログラムで2つのマイクロビットで通信できるようになりました。
micro Maqueen
それとマクイーンの操縦(そうじゅう)と結びつければ操縦できます
前に進め
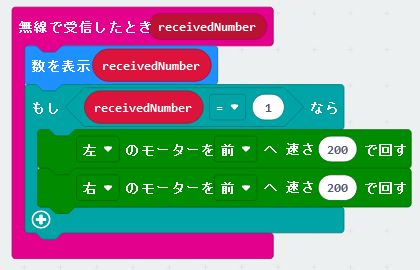
これでまっすぐ進むか確かめましょう。
まっすぐ進まないときは、片方の数にを大きくしたり小さくしたります。
同じ数字で同じように回るとは限らないのです。
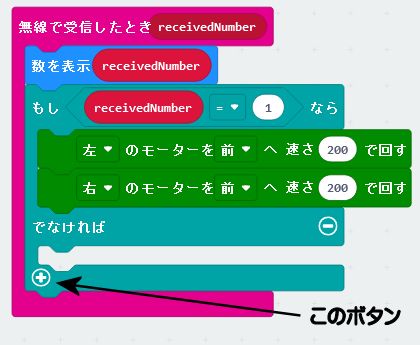
できたら、上の図の+マークを押します。
右回れ、バックしろ
ボタンを押すと、【でなければ】という文字が出てきます。
【もし】というのは【条件分岐(じょうけんぶんき)】という命令です。
様々な条件で、別々の命令へ分岐する(分かれる)、ということです。
英語では if (IF・イフ)といいます。これを使った命令を IF文 といいます。
【でなければ】をつなげることで、様々な場合に応じたプログラムが動きます。
英語では【else】(エルス)といいます。
この2つは、プログラムでは、とても重要(じゅうよう)な命令(めいれい)です。
これでいろいろなロボットが動かせます。
やってみましょう
+文字を3回押すと次のようになります。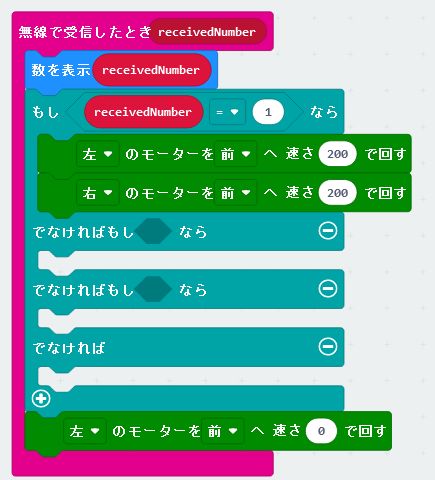
これで、3つ条件分岐(じょうけんぶんき)ができましたから、前、右回転、後退の3つの命令ができます。
作ろう
プログラムはここにあります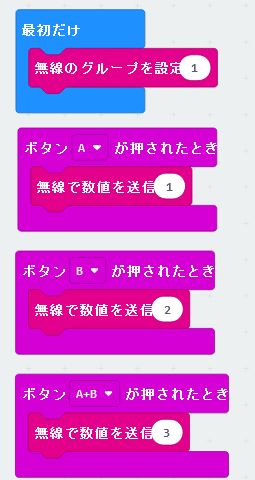

えっと、ぶつからないようにしたいときは
変数【ugoki】を用意して無線できた数字を変数に格納します。
そして、変数によって動きを制御(せいぎょ)します。
次に、【もし 距離が20cm以下だったら、止まる】ようにします。
これは次のページで
次へ