マクイーンの操縦 ぶつからないように
まず最初の部分はちょっとだけちがっている。どこがちがうかというと一番下の所
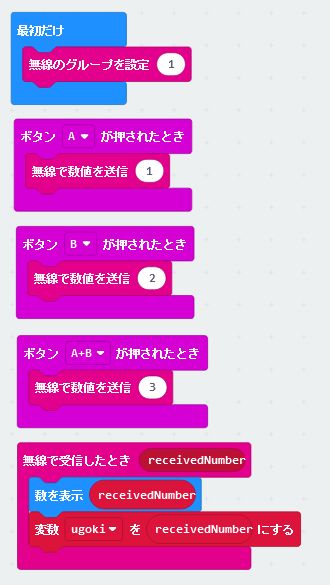
どこがちがうかというと一番下の所
【ugki】という変数をまず作る。
そして、その変数の値を、無線で受け取った番号にします。
どうしてこうするかというと、先ほどのように
【無線で受信したとき】の中にプログラムを書くと無線で受信したときにしか動かないからです。
距離センサーで何か変えても、無線で送らないとダメ・・・ということで
距離センサでも、無線で受信したときでも制御できるように【ugoki】という変数を使うのです。
変数名は何でも良いんだけど。
動きの制御(せいぎょ)
まず、距離センサーで反応するように、
一番上に距離センサーで、距離が20cmより小さくなったときちょっとバックして止まるようにしました。
(ちょっとというのは20m秒(ミリ秒)。
1ミリは1000分の1だから、20ミリ秒は1000分の20秒と言う意味です。)
後は、変数【ugoki】で制御してます。

【もし】というのは【条件分岐(じょうけんぶんき)】という命令です。
様々な条件で、別
これで、3つ条件分岐(じょうけんぶんき)ができましたから、前、右回転、後退の3つの命令ができます。
作ろう
プログラムはここにあります
もどる